Robots
More tasks are being performed byrobots , yet the past 100 ’s media portrayed domesticated robot ' butlers ' very differently from the I today due to the difficulty integral to building a android robot . A question asked of roboticists is when modern robotics will charm up to those portrayals , humanoid car that articulate and move similar to humans , and whenrobots able to do choresand severe job could be commercially uncommitted . A sometimes silly but reliable interrogation , and one that is still being work on .
The human body is incredibly various and roboticists have been trying to replicate it for a very long time . Walking legs and foot can handle terrain that cycle and tread using car can not , and the flexibility of human - type hand makes them the best all - around object manipulators . Several attempts have been made over the years to varying grade of winner , but those most vulgar and successful of these robot run to feature simple-minded claw or friction grip script and have either four leg orwalk on two bird - like legs .
colligate : This Super Springy Robot Leaps A Record - Setting 100 Feet
It is ultimately the inherent difficultness of design and programming humanoid legs , feet , arms , and work force that make such robots so hard to make , as explained inSilicon Republic . The biological system of walking on two legs and get the picture hand are complex , requiring several system to go exactly in synch . The fact that Earth does n’t have many bipedal or handed specie should paint a picture of how complex these functions are , and replicating them is difficult and expensive . Bipedal walking require a unvarying balancing human action between nerves and muscles . endure ‘ still ’ on two feet is an combat-ready labor , with several muscles all over the legs and feet always give notice to reduce swaying around as the Libra the Balance is constantly adjusted . Manybipedal robots that walkfall because the system ca n’t balance without alike systems and computer programing to keep it upright .
Mechanical Feet And Hands Are Difficult To Build
It ’s even heavy to plan walk robot with humanoid foot , as the organisation has to then factor in the slant each part of the flexible bottoms of each foot has to be at for the robot to adapt to terrain . For a machine to walk upright on humanoid legs without falling over , it would need the same range of flexibility in the same places on the entirety of its legs and feet , each position requiring unique joints , motors , and feedback mechanisms all swot up into the same space , do the strong-arm design incredibly complicated . Often the available parts for such things are too big or do n’t match together well enough to be deserving this added complexness . The most mutual workaround is to makerobots four - legged with rotund foot , as have three of the foot on the ground at once makes it easier to keep balance wheel , and a deal like a four - legged stool this entail the anatomy of the feet do n’t matter .
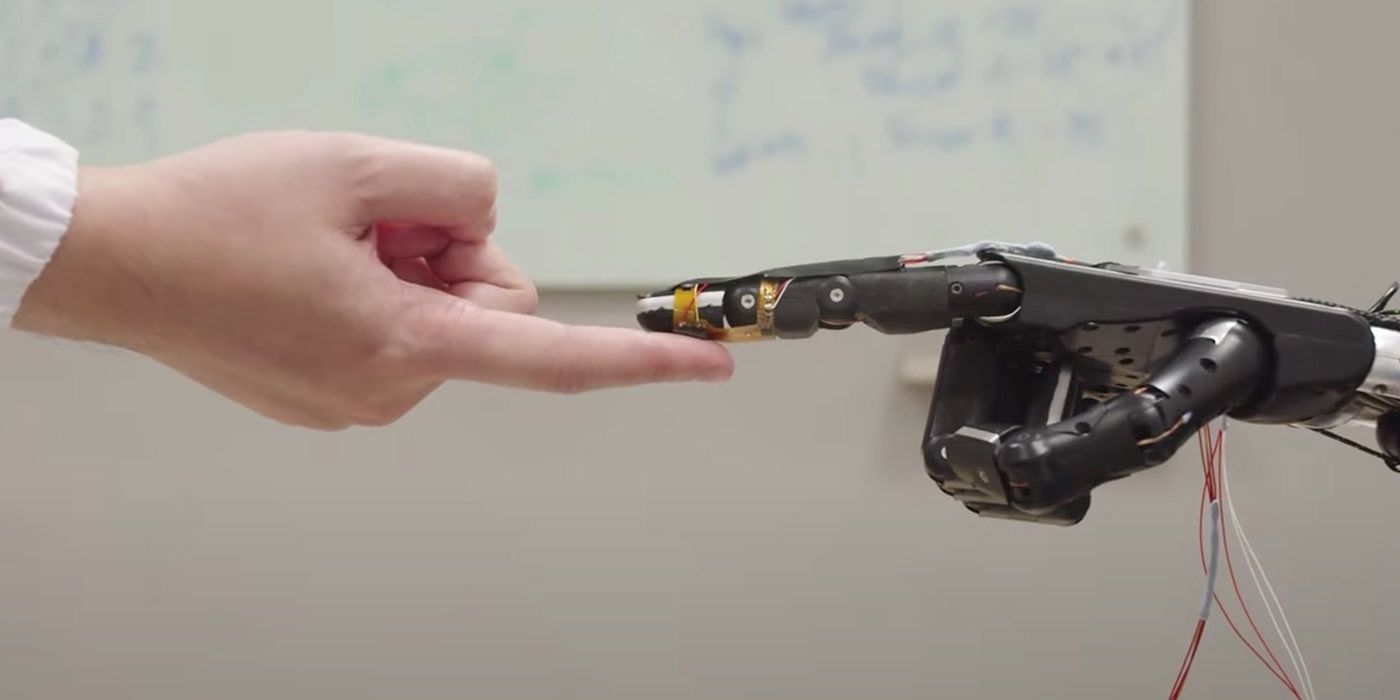
Even harder to project are compass hands , which require the same flexibility , control , and preciseness as feet and more . Robotic arms and snap up machine used in many industrial options tend to have ‘ hands ’ with few fingers that look more like crab nipper – vices that move between repair positions rather than using several pliant fingers . Robots do n’t inherently have any feedback mechanism to tell the system how tightly the motorcar is force something , they just open and close their joints a programme amount . Without a feedback mechanism telling the robot how strong it ’s squeezing , robot hands design to grip itemscan damage things by press too heavily or not hard enough . Claw - like robotic hand instead are programme to open and close their pair of tweezers to preprogrammed emplacement to hold the same eccentric of object over and over . With the needed joints and programing to reduplicate the range of motility of multijointed finger plus palm and wrists , true hands are more complex to plan than feet .
Despite boring advance , roboticists are working to overcome and trouble-shoot these limitations in robots . Much work goes into balancing systems using solutions like gyroscope , and there are competitions fordesigning robots that can remain uprighton varying terrain . radical including biomechanical engineer serve plan new hands , as this technology can make prosthetic hands . The result , and maybe someday , robotbutlers , will get in metre .

Next : Uber Eats Is Now Using Robots To give birth intellectual nourishment
Source : Silicon Republic