Robots
Many citizenry will remember Boston Dynamics’robotnamed Spot , but a new four - legged robot dog being grow by investigator at Carnegie Mellon University and UC Berkeley is now in the limelight . Robotics and engineering science have follow a long way over the last few years , and researchers are constantly make for to create better and more advanced robots that are power by artificial intelligence information .
Unlike most creature that tend to rely on their sight to move about their environment , automaton can use a combining of sensors andcameras to map out out their environment . Boston Dynamics ' golem for case uses an home map to move about . However , this can have some constraints , such as robot not being able to navigate new surround and obstacle . Researchers want to change that with a raw four - legged golem dog .
colligate : Xiaomi beat Tesla To A Bipedal Robot Prototype
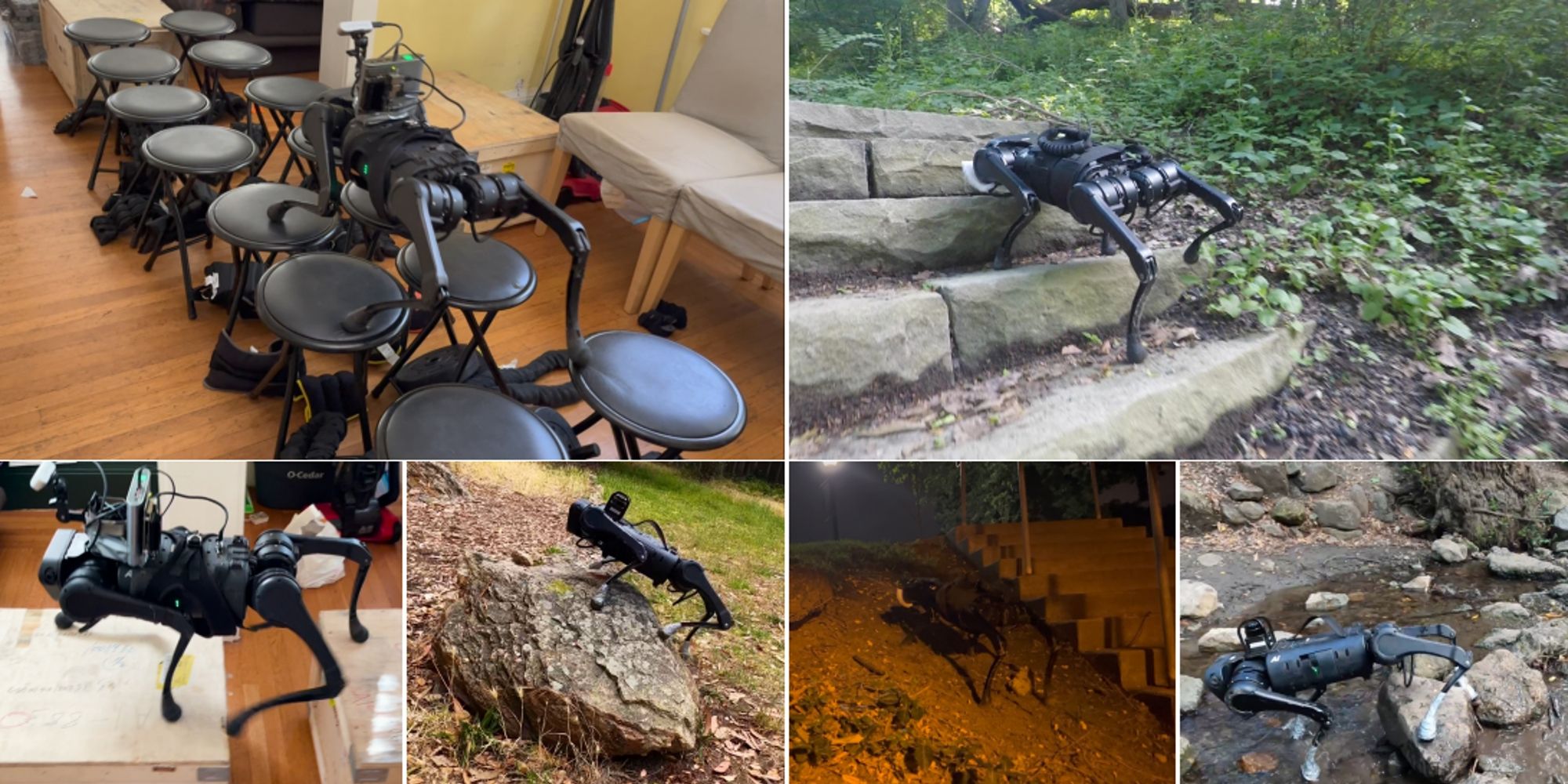
The team at Carnegie Mellon ( viaMIT Technology Review ) havecreateda robot dog that relies exclusively on camera to guide its motion . Before being release into a new environs , the robot is first trained to sail unlike environment in a simulator , much likehow human baby acquire to walkusing trial and error . Since the robot only uses vision to sail the terrain , it must remember the location of objects behind it while moving . A short video recording evidence the golem rise over barstools , where it ask to commemorate the emplacement of the stools it just step over to place its hind feet correctly .
The Robot Dog Has Its Limitations
The investigator said the robot also demonstrated " emergent climbing up behavior , " which allowed it to solve problems even after initially getting stuck . Since the robot relies on vision , it can move across terrain that it has not been specifically trained for in a generalised style , like to how humansmove across unexampled terrainthey have never seen before . The robot is extremely resilient as well , being able-bodied to walk across slippery surfaces and survive tumble .
Of course , nothing is staring , and there are some limit and unsuccessful person case for this robot . first , since the robot apply human being - like vision to move , that comes with human - prone mistakes as well . For example , when make a motion across multiple object with gap between them , the golem is not capable to see the objects behind it . If there is an mistake inretrieving old emplacement of objectsthat the back wooden leg need to step on , the robot will neglect the whole tone and fall over . Another trouble happens with a dance step that is too large and when the extent of the drop can not be watch . When this happens , the golem simply pass off the gradation . But with more refinement and fudge factor , these problems can be lick in the futurity .
Interestingly though , when the automaton was placed in whole unstructured terrain that it has n’t been civilise in , such as rocky or slippy incline , it was still able to adapt and move forward , even though it had accident along the fashion . The automaton ’s tv camera also includes an infrared loose sensor that allows it to pilot in the dark with only a little ambient light . TV show it queer roads and climb down stairs at night , which is pretty impressive . While it still has a farsighted way to go , the team at Carnegie Mellon have taken a major step towards create arobotthat can endure in the actual world .
Next : Uncanny Valley Theory : golem With Human Characteristics Being embrace
rootage : MIT Technology Review , VisionLocomotion


